USBL Buoy
Integrated surface unit for acoustic positioning and communication


Integrated surface unit for acoustic positioning and communication
USBL Buoy
● The EvoLogics USBL Buoy is a fully integrated, plug-and-play surface gateway for real-time tracking of underwater assets: all in one single, compact system.
Simply unfold its antennas, set it into the water, and it’s ready to go - no pre-deployment calibration required.
Equipped with a USBL transceiver, AHRS, dual GNSS antennas, onboard PC, wireless access point and rechargeable battery, the buoy delivers accurate geo-referenced USBL positioning and seamless data exchange straight out of the box.
The design of its lightweight, robust carbon and glass fiber housing is inspired by fishing floats, ensuring stable operation in coastal and offshore environments. Designed for rapid deployment, it can be transported, assembled, and operated by a single person.
The buoy runs EvoLogics’ SiNAPS software onboard, and is a full-fledged EvoLogics modem inside - allowing live data exchange, custom scripting, and integration with your own software to adapt the unit to the specifics of your application.
USBL Buoy

The EvoLogics USBL Buoy combines key features that deliver precision, reliability, and seamless integration across the EvoLogics acoustic product range.
USBL Buoy
The EvoLogics USBL Buoy combines USBL positioning essentials:
A compact, floating system that contains all core components for underwater positioning and communication. Simply unfold the antennas, set the buoy into the water, power up – and it is ready. Its rugged carbon and glass fiber housing ensures stability and reliability in diverse weather conditions.

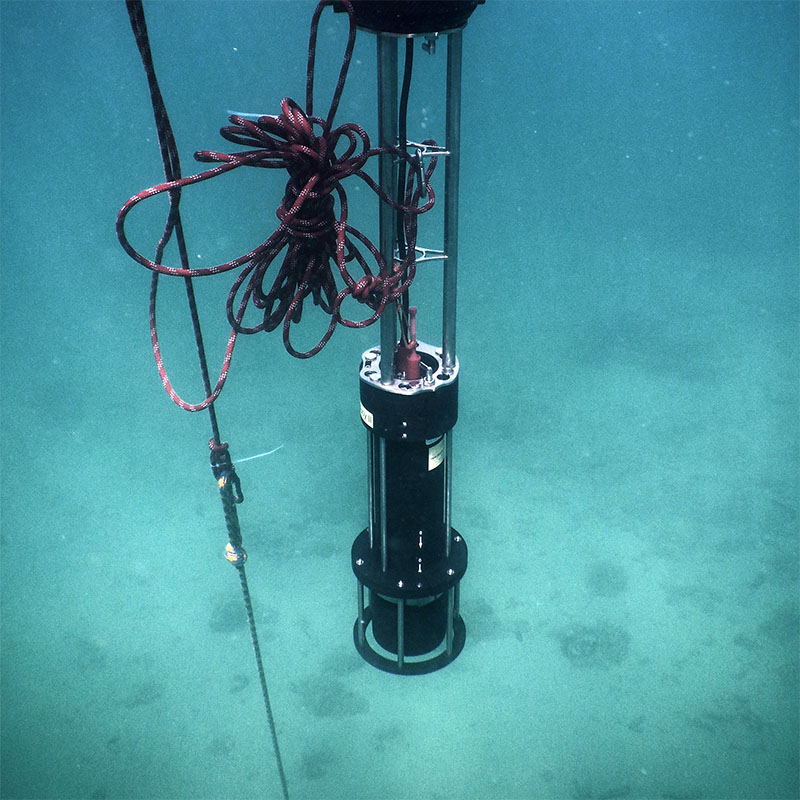
Enables motion-compensated, accurate underwater acoustic positioning, forming the backbone of the buoy’s asset tracking capabilities.

Built-in dual-antenna GNSS provides accurate geo-referenced positioning for the buoy and connected assets, without the need for pre-deployment calibration.

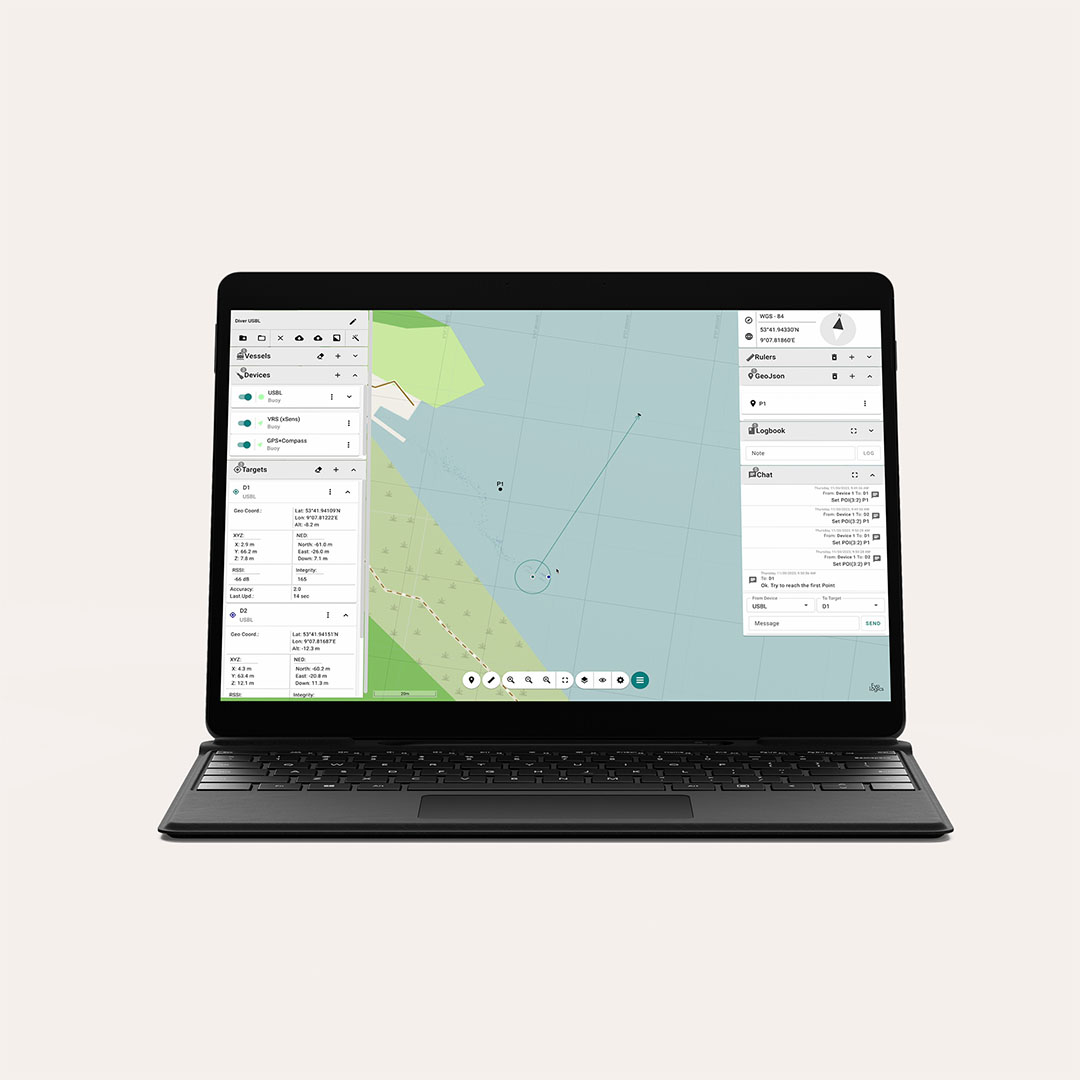
Processes positioning and communication data in real time, running the SiNAPS software for direct control and map-based monitoring.

Enables reliable wireless connectivity to the buoy from nearby devices. Provides browser-based access to the positioning software, supporting flexible setup in the field.

Supports extended autonomous operation, keeping all systems running reliably during deployment.

SiNAPS is the onboard software platform for processing positioning data and mission control. It calculates and outputs locations of tracked assets, accessible via the SiNAPS GUI through wireless connection from shore. No client app is necessary - simply open the interface in a modern web browser for a map-based view and full mission control.
USBL Buoy
The EvoLogics USBL Buoy is available in multiple configurations, with flexible hardware and software options to support accurate positioning, acoustic data exchange, and seamless system integration.
[01]
Any device from the EvoLogics PRO USBL range can be selected for your Buoy configuration. Choose the frequency band and directivity pattern combination that best fits your application scenario.

[02]
Choose between NiMH or Li-ion batteries and several capacity options - up to 342 Wh available to support longer operation times.

[03]
Wifi: Connect directly to the buoy for short-range operation, typically up to 200 m.
Wifi with land station: Extend your reach with a tripod-mounted antenna, allowing connections up to 1500 m depending on configuration.
Long-range radio with land station: enables long-range communication over 5 km, and up to 15 km in optimal conditions, with optional LTE and tripod-mounted antennas for maximum coverage.

USBL Buoy
USBL Buoy

Surface node for AUV and ROV positioning
Enable accurate tracking and coordination of autonomous and remotely operated vehicles during underwater missions, with positions monitored in real time.

Surface node for data relay
Collect data from underwater vehicles and sensors and relay it to the shore over the wireless link.

Surface node for diver navigation
The USBL Buoy acts as the central surface node for the Diver Navigation System, facilitating real-time positioning and communication for divers equipped with acoustic trackers.
Surface node for underwater acoustic sensor networks
Manage multiple sensors as a central hub for coordinated data collection across a monitoring network.
Contact
Get in touch and share your project requirements – let’s put together the optimal USBL Buoy for your operations.
All information you provide us is treated with strict confidence and stored only in relation to your request.
