Underwater Positioning
Positioning systems at a glance
At EvoLogics, we build on a solid foundation of advanced acoustic communication and data processing to deliver reliable underwater communication and positioning systems for any project scope.
Whether you require a ready-to-use USBL solution, a custom SBL/LBL, or a hybrid system that combines the benefits of several approaches, we have the expertise and products to meet your underwater positioning needs.
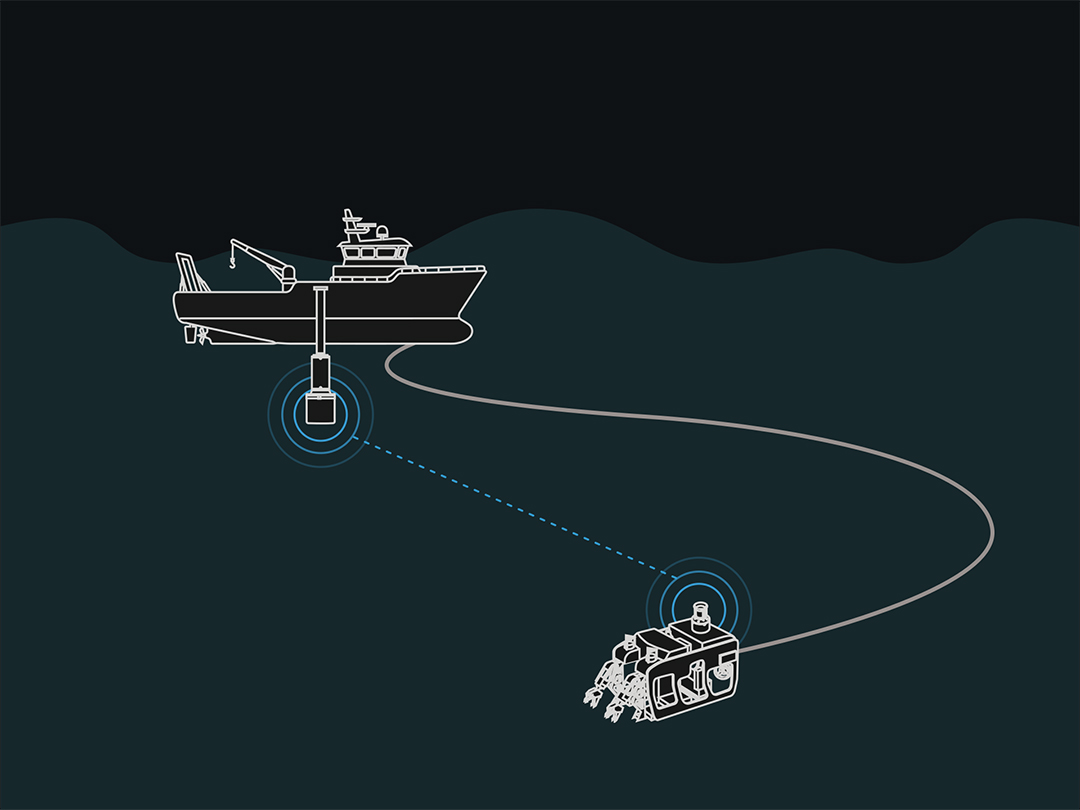
[01]
USBL
Ultra-Short Baseline:
Fast, portable, but less accurate at distance.
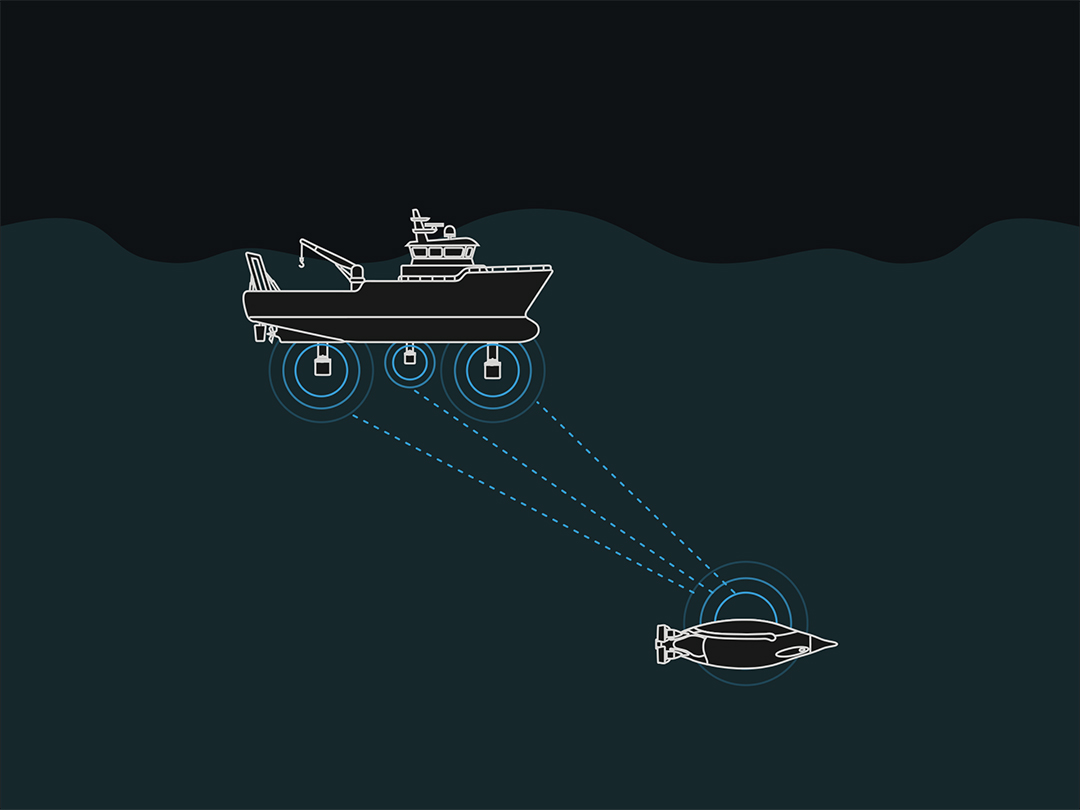
[02]
SBL
Short Baseline:
Medium accuracy, vessel-mounted installation
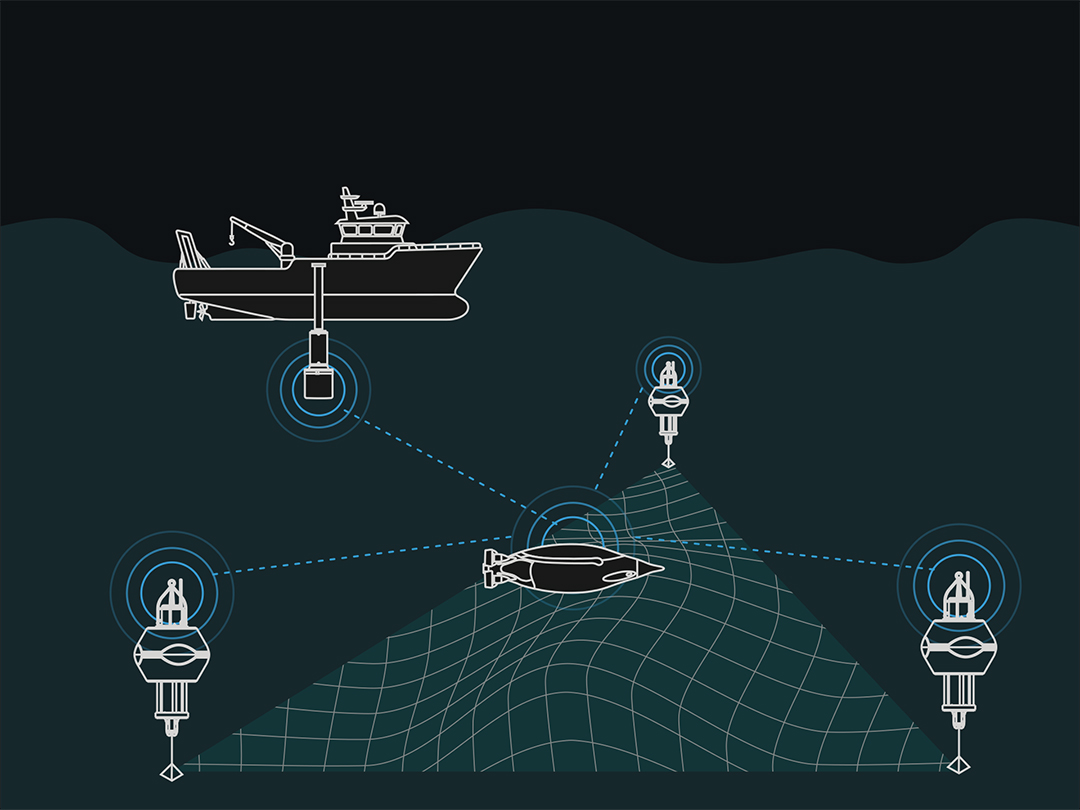
[03]
LBL
Long Baseline:
Most accurate and reliable, elaborate setup and calibration needed