Research & Science Project
NaviMUM

Status
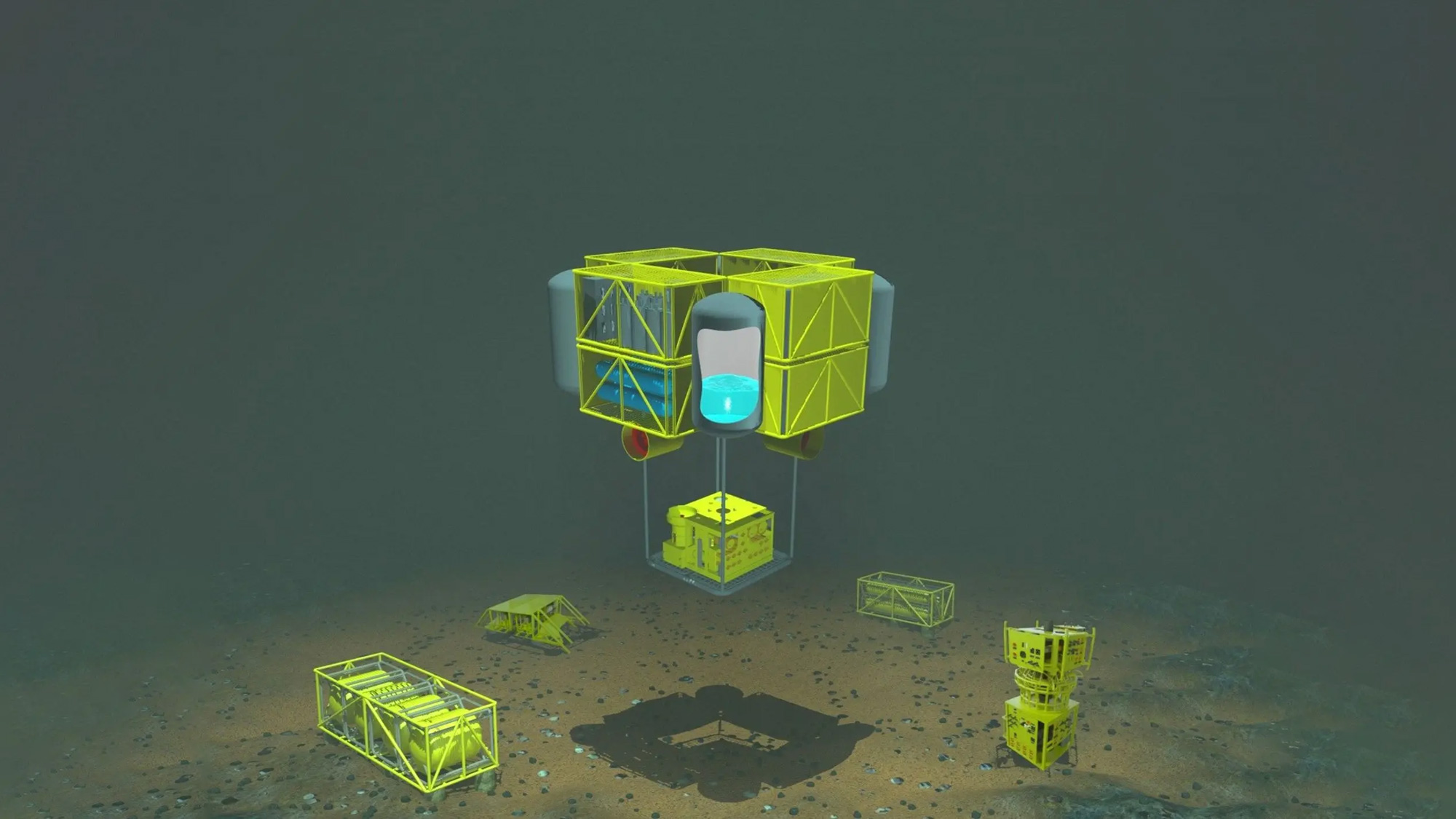
The NaviMUM project is a sub-project of MUM (Large Modifiable Underwater Mothership) and focuses on enabling autonomous and precise underwater navigation, positioning, and communication for the new XLUUV vehicle class. This will be achieved through a telemetry network created by autonomous network nodes operating in the vicinity of the vehicle.
The first step involves analyzing the range of tasks expected of MUM to establish the specific requirements for NaviMUM. Based on this analysis, individual solutions will be developed and integrated into a comprehensive concept addressing the functional spectrum of the network nodes and the adaptive capabilities of the self-organizing support network. The system will also be integrated into the MUM vehicle guidance system. Simulations of various mission strategies and safety measures will be conducted, leading to the definition of hardware and software configurations. Prototypes of the autonomous network nodes will then be developed and built.
The autonomy requirement necessitates that each unit includes its own propulsion and trim systems, a flow-optimized design, and additional sensors. The research will also explore self-setting anchors for stationary tasks. Extensive laboratory and open-water trials will test individual nodes and refine the algorithms for acoustic network operations across different underwater scenarios and maneuvering processes. Planned model tests and port/open-water trials will be supported and validated using newly developed underwater networking, measurement, and communication technologies.
Research & Science
News & Events
Contact
We’d love to hear from you! Whether you have questions, feedback, or just want to say hello, reach out to us.
All information you provide us is treated with strict confidence and stored only in relation to your request.








.jpeg)


