BOSS Project
Manta Ray AUV
EvoLogics BOSS - Manta Ray
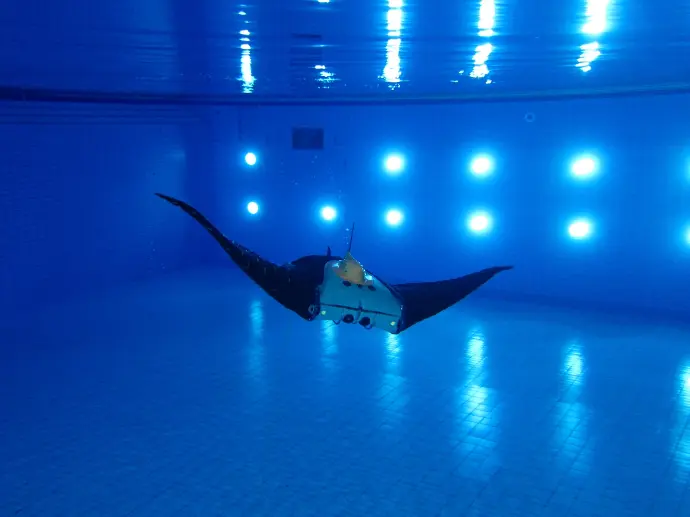
The BOSS Manta Ray is an autonomous underwater bionic vehicle the company has been developing since 2013 within the framework of the Bionic Observation and Survey System project.
BOSS is a joint research effort, supported by the German Federal Ministry for Economic Affairs and Energy (BMWi). The goal is to create a powerful and flexible underwater exploration and monitoring system, particularly suitable to
access hard-to-reach or yet unexplored areas with its unique functional properties. Deployed in the target area for observation and survey,
the BOSS system is a self-coordinating swarm of autonomous underwater vehicles (AUVs), all linked into a multimedia sensor network with latest communication and navigation technologies.
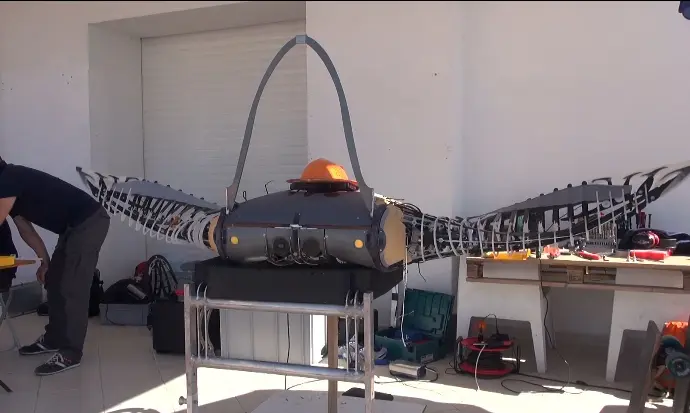
The AUV is the project's core innovation - engineered and built at EvoLogics,
the experimental bionic vehicle is modeled after a Manta ray and can move through the water by wing-like movements of its "pectoral fins".
Fin Ray Effect
Recent studies on the functional morphology of fins of fishes show a surprising biomechanical effect of the fin rays. The bionic implementations of these constructions led to shape-adaptive wing profiles and flow control devices.
The functional principle has been patented as "Fin Ray Effect" and is one of the core technologies behind the BOSS Manta Ray.
The "Fin Ray Effect" drives innovation for multiple industries. Possible applications range from adaptive seating constructions to novel safe form-locking grips, household appliances and surgical instruments.

Design
The AUV construction mimics the manta's flexible body, giving the robot unique mobility characteristics: the large wing surface provides the vehicle with excellent dynamic depth control capabilities. The moving AUV can hold depth with highest precision, as well as perform highly dynamic dives and climbs. Inspired by nature, propulsion in "flapping wing" mode is very energy-efficient and offers long range and endurance.
During its missions, the robotic Manta can demonstrate the wildlife counterpart's gliding and maneuvering abilities in open ocean, as well as precisely navigate over rugged seafloor terrain or in a closed-off environment, overcoming the limitations of traditional torpedo-style AUVs that lack agility near unstructured objects (coral reefs etc).
In addition, the bionic Manta vehicle is fitted with jet thrusters and can move in high-speed mode, similar to standard AUVs widely in use.
Propulsion Modes
- Active life-like wing propulsion and leveled gliding - quiet, fast and efficient with extraordinary maneuverability
- Hydro-jet propulsion - precise control of the trajectory maintaining accurate depth levels without body oscillations - suitable for precise sonar measurements, sea-floor mapping and add-on speed requirements

Applications
Modern tasks - deep sea exploration, offshore mining, ecological research, environmental monitoring and marine security - are becoming more and more demanding, whereas most systems currently in use are large, heavy and extremely expensive. Apart from requiring sophisticated support, operation of bulky equipment is very risky, especially when working in the vicinity of fragile deep-water installations. There is an obvious strong need for smaller and smarter platforms.
New technologies and smarter constructions enable cost-efficient solutions by getting rid of cables, "unchaining" underwater equipment and to replacing remotely operated vehicles (ROVs) with intelligent autonomous underwater vehicles (AUVs).
The BOSS AUV fleet offers smart functional design with
life-like swimming capabilities for:
- Hydrographic Profiling
- Sea Floor Cartography
- Monitoring and Search Missions
- Technical inspection of subsea installations
PARTNERS



FUNDED BY

Förderkennzeichen: 03SX361A, BOSS-MANTA Die Verantwortung für den Inhalt dieser Veröffentlichung liegt beim Autor.