Research & Science Project
WiMUST
Status
Project Partner
Funded by
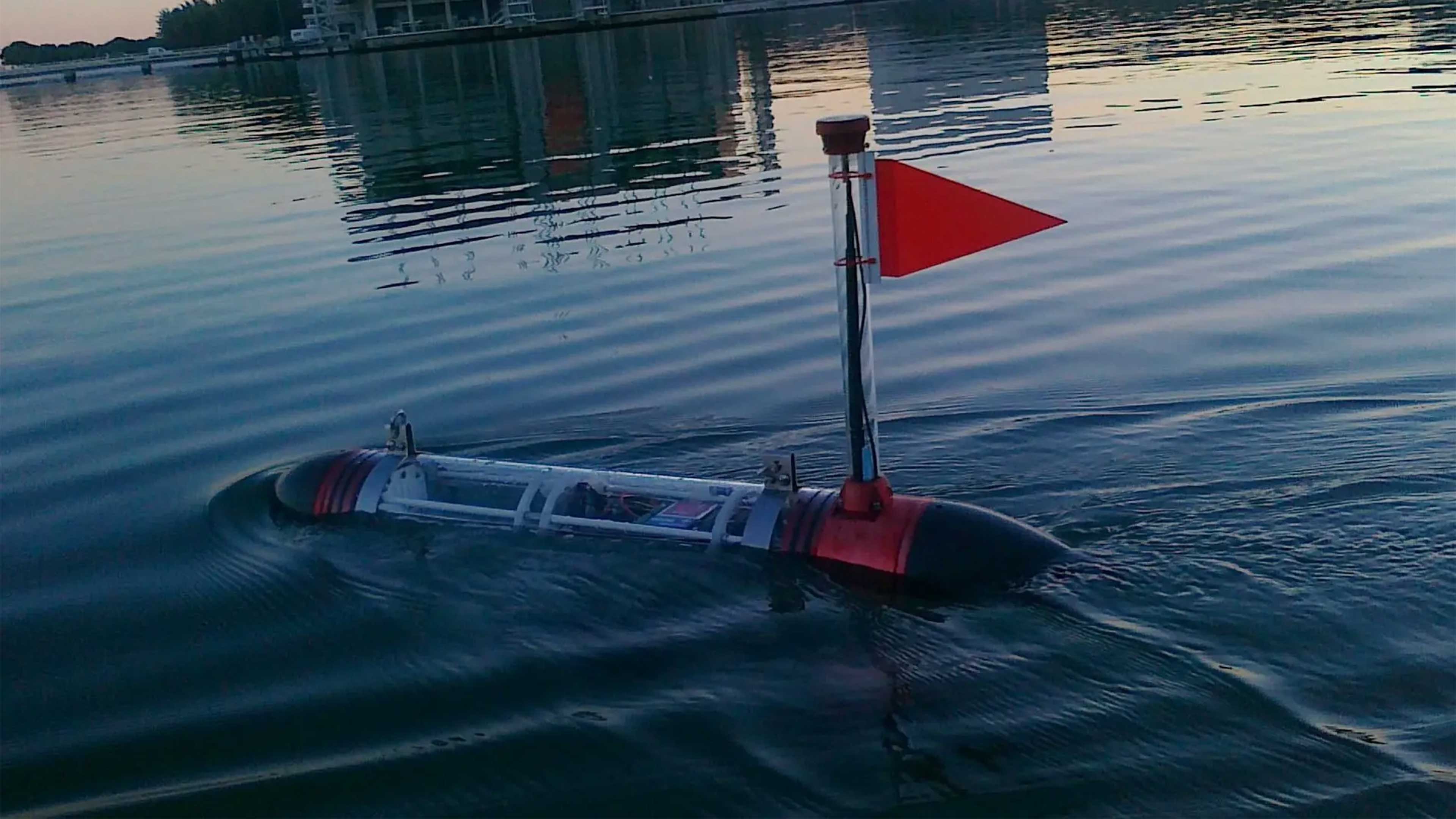
WiMUST aims at conceiving, designing, and engineering an intelligent, manageable, distributed and reconfigurable underwater acoustic array that could drastically improve the efficacy of the methodologies used to perform geophysical and geotechnical acoustic surveys at sea.
The novel key feature of the WiMUST system consists in the use of a team of cooperative autonomous marine robots, acting as intelligent sensing and communicating nodes of a reconfigurable moving acoustic network.

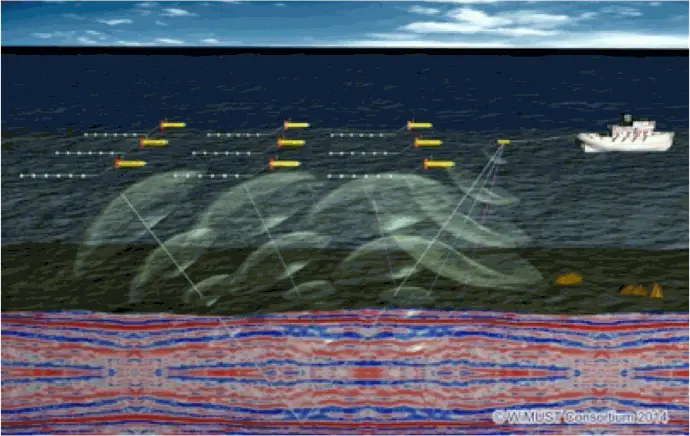
Recent developments have shown that there is vast potential for groups of marine robots acting in cooperation to drastically improve the methods available for ocean exploration and exploitation. Traditionally, seismic reflection surveying is performed by vessel-towed streamers of hydrophones acquiring reflected acoustic signals generated by acoustic sources (either towed or onboard a vessel). In this context, geotechnical surveying for civil and commercial applications (e.g., underwater construction, infrastructure monitoring, mapping for natural hazard assessment, environmental mapping, etc.) aims at seafloor and sub-bottom characterization using towed streamers of fixed length that are extremely cumbersome to operate. The vision underlying the WiMUST proposal is that of developing advanced cooperative and networked control/navigation systems to enable a large number (tens) of marine robots (both on the surface and submerged) to interact by sharing information as a coordinated team (not only in pairs).
The project brings together a group of research institutions, geophysical surveying companies and SMEs with a proven track record in autonomous adaptive and robust systems, communications, networked cooperative control and navigation, and marine robot design and fabrication.
Research & Science
News & Events
Contact
We’d love to hear from you! Whether you have questions, feedback, or just want to say hello, reach out to us.
All information you provide us is treated with strict confidence and stored only in relation to your request.








.jpeg)


